Welcome to the re-designed Walke Designs home page. We’ve spruced up the look and made it easier for us to post new content here. No more waiting years for updates on your favorite small-town geeks.
Category Archives: News
Migrating to WordPress
We’re in the process of migrating our blog to WordPress, which will let us focus on getting information to you rather than getting hung up on the web design details. The upshot is that you’ll be getting a lot more updates from us in the near future. Keep checking in with us here at walkedesigns.com, and try out our new FeedBurner, see the videos Caleb posted on YouTube, and Like our facebook page.
Update 2
Well, it’s been too long since I posted an update on my progress with the project. I’ve spent a majority of the time getting everything
together for my IEEE Digital Design Contest submission. I got that submitted Sunday and now it’s time to get back full time to my RC car design.
Let me go over some of the decisions I have come up with in the meantime.
- First I have found an awesome chassis for my project. It’s 4-wheel drive, 1/8-inch aluminum and the motors are rated for about 7.2V running speed,
giving the thing about a 7Km/h no-load speed. The tires on it are about 120mm in diameter giving it a good 60mm ground clearance. - I’ve finished the design of my motor control circuit. Its super simple: I just copied the L298 IC design, just using
MOSFETs with a high current tolerance for the motors, as the motors have a stall current of about 6.6A.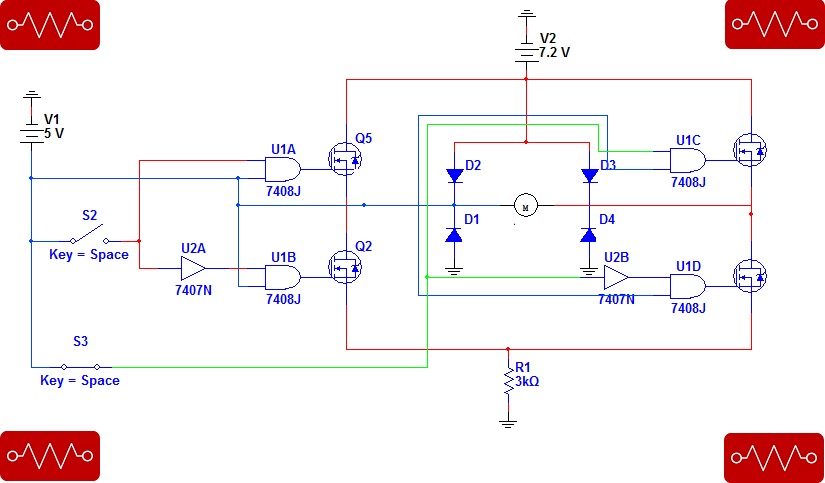
Motor Control Circuit Schematic. Click to see full-size.
- I think for the time being for testing purposes I am going to use my “My Daq” made by National Instruments
as my o-Scope and function generator for troubleshooting. It’s a good little device and I think it will work
just fine for the applications that I need it for. - Regarding the question of FPGA vs µC, µC is the answer. I decided to get a Microcontroller to run the PWM on my project. I found a really awesome
company that makes test boards for them called Arduino. They are Italian in origin, but they are totally full of win.
The programming system is open-source and based very closely on C. When you download the software for programming them it comes
with a bunch of general programs on it that are commented excellently to help you learn how to use it. So far, an awesome buy.

My new question is that do need 2 µCs? I have worked on my x-box controllers a bit and I noticed that they have a µC
(or something) controlling the inner workings before data is sent to the main base station. Using 2 µCs might make this easier.
(one for the controller portion, and one for the motor control.)
That’s it for now I hope to get the motor control working on breadboard soon and I will have pictures and possibly videos for that when I do.
Here’s the current status of our master checklist:
- [ ] Ascertain how to use antennas with this project
- What frequencies can I use?
- What ranges can be expected?
- Are there any IC’s that make this easier?
- Can information go both ways?
- [X] How many L298 (H-bridge) IC’s do I need for 4 DC motors?
2, but do I really need to run all 4 individually?
- [X] Find a good chassis
- With some good DC motors
- Not too Big.
- Not too small.
- Around 9v Max running voltage
- [ ] Find a good way to power all of this
- Perhaps adapt another battery pack from another RC car
- Something with enough power to run it for about 2 to 4 hours
- Preferably rechargeable.
- [X] Find a way to be able to use an O-Scope and Function Generator for testing purposes
- [X] FPGA or µC? That is the question
- Programming Language
- Price of Testing, SW, and Mounting
- [ ] 1 or 2 µC?