Well, it’s been too long since I posted an update on my progress with the project. I’ve spent a majority of the time getting everything
together for my IEEE Digital Design Contest submission. I got that submitted Sunday and now it’s time to get back full time to my RC car design.
Let me go over some of the decisions I have come up with in the meantime.
- First I have found an awesome chassis for my project. It’s 4-wheel drive, 1/8-inch aluminum and the motors are rated for about 7.2V running speed,
giving the thing about a 7Km/h no-load speed. The tires on it are about 120mm in diameter giving it a good 60mm ground clearance. - I’ve finished the design of my motor control circuit. Its super simple: I just copied the L298 IC design, just using
MOSFETs with a high current tolerance for the motors, as the motors have a stall current of about 6.6A.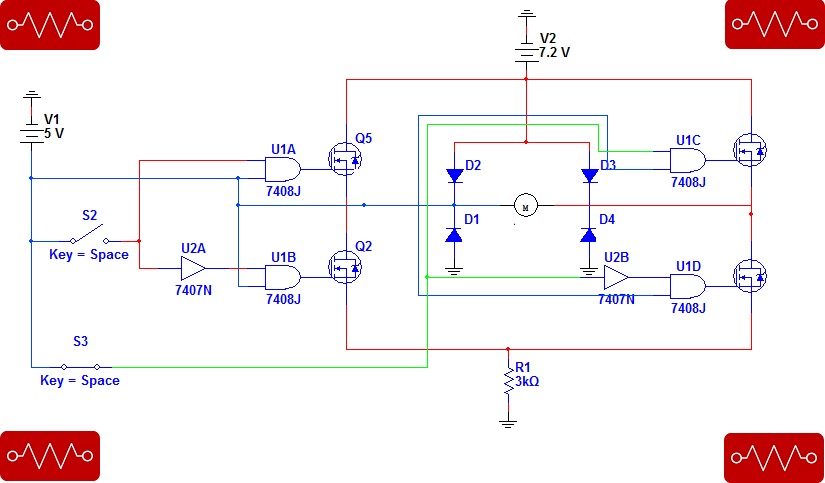
Motor Control Circuit Schematic. Click to see full-size.
- I think for the time being for testing purposes I am going to use my “My Daq” made by National Instruments
as my o-Scope and function generator for troubleshooting. It’s a good little device and I think it will work
just fine for the applications that I need it for. - Regarding the question of FPGA vs µC, µC is the answer. I decided to get a Microcontroller to run the PWM on my project. I found a really awesome
company that makes test boards for them called Arduino. They are Italian in origin, but they are totally full of win.
The programming system is open-source and based very closely on C. When you download the software for programming them it comes
with a bunch of general programs on it that are commented excellently to help you learn how to use it. So far, an awesome buy.

My new question is that do need 2 µCs? I have worked on my x-box controllers a bit and I noticed that they have a µC
(or something) controlling the inner workings before data is sent to the main base station. Using 2 µCs might make this easier.
(one for the controller portion, and one for the motor control.)
That’s it for now I hope to get the motor control working on breadboard soon and I will have pictures and possibly videos for that when I do.
Here’s the current status of our master checklist:
- [ ] Ascertain how to use antennas with this project
- What frequencies can I use?
- What ranges can be expected?
- Are there any IC’s that make this easier?
- Can information go both ways?
- [X] How many L298 (H-bridge) IC’s do I need for 4 DC motors?
2, but do I really need to run all 4 individually?
- [X] Find a good chassis
- With some good DC motors
- Not too Big.
- Not too small.
- Around 9v Max running voltage
- [ ] Find a good way to power all of this
- Perhaps adapt another battery pack from another RC car
- Something with enough power to run it for about 2 to 4 hours
- Preferably rechargeable.
- [X] Find a way to be able to use an O-Scope and Function Generator for testing purposes
- [X] FPGA or µC? That is the question
- Programming Language
- Price of Testing, SW, and Mounting
- [ ] 1 or 2 µC?